Haoru Xue
M.S. Robotics, Carnegie Mellon
Find me on GitHub, LinkedIn, or reach out on email. I also have a YouTube channel for some interesting research clips in autonomous racing.
Autonomous race cars should, as their human counterparts, learn about the dynamics of the vehicle and track conditions on the fly, and optimize over laps. I research in learning-based model-predictive controller that combines ML techniques and optimal control for safety-critical systems with unknown changing dynamics.
RL and foundation models has the potential to achieve more advanved robot autonomy. The reliable evaluation of such policy on real-time safety-critical systems could bring innovation to AV and robotics systems in extreme environments.
Overtime, the open-source community around ROS and ROS2 has made open AV architecture readily available. Autonomous racing, however, pushes roboticists to re-think about these stacks. I am an active contributor to the open source robotics world, with contributions ranging from MPC to sensor drivers.
🥈 2nd Place, Indy Autonomous Challenge at Texas Motor Speedway 2022
🥉 3rd place, Indy Autonomous Challenge at Las Vegas Motor Speedway 2023










I’m interested in:
I have full-stack experience in autonomous driving, from high-level autonomy software architectures to drive-by-wire system programs. I deploy full-size, safety-critical robotics systems in the field.
Learning Model Predictive Control with Error Dynamics Regression for Autonomous Racing
Haoru Xue, Edward L. Zhu, Francesco Borrelli
Submitted to ICRA 2024 | arxiv | video | code
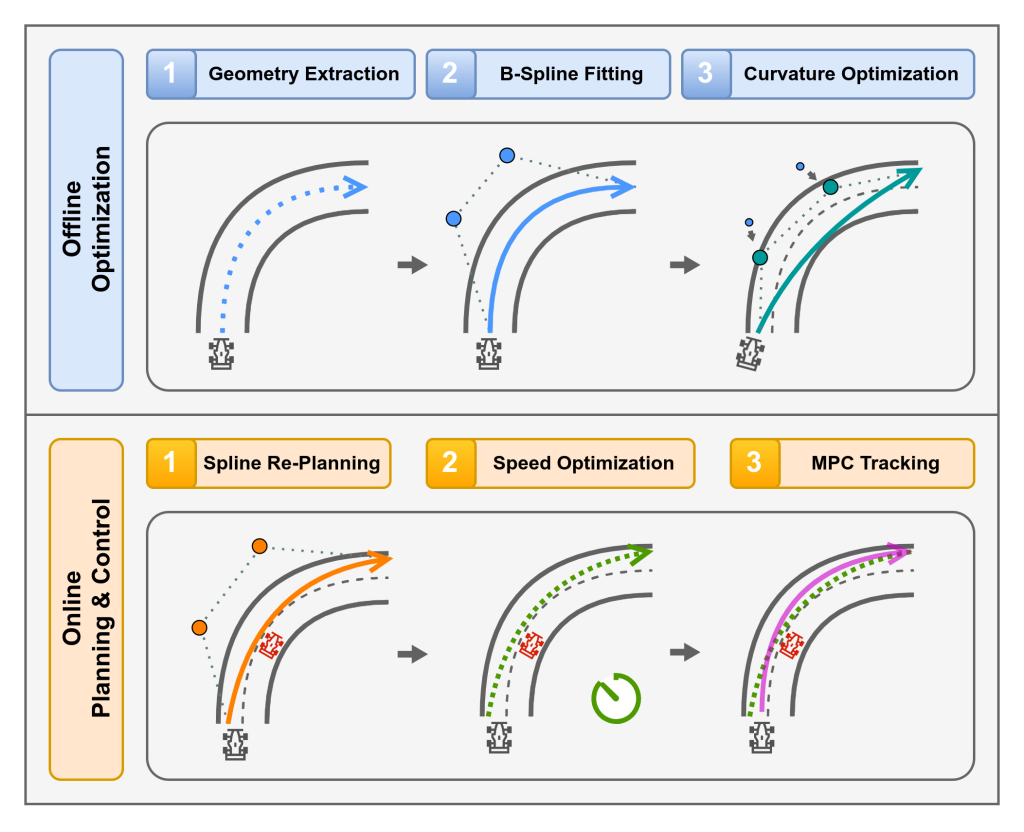
Spline-Based Minimum-Curvature Trajectory Optimization for Autonomous Racing
Haoru Xue, Tianwei Yue, John M. Dolan
Submitted to ICRA 2024 | arxiv | code
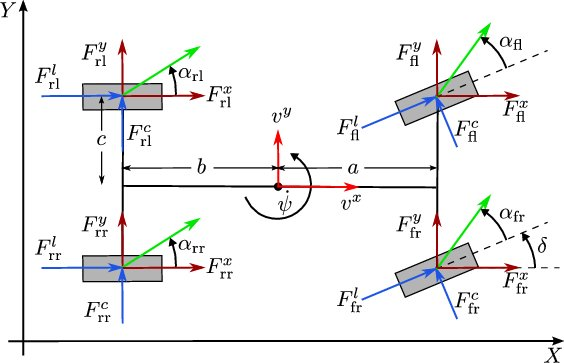
Model Predictive Control for Integrated Lateral Stability
Jad Yahya, Siddharth Saha, Haoru Xue, Allen Y. Yang
Submitted to IEEE TAC | arxiv | code

Find me on GitHub, LinkedIn, or reach out on email. I also have a YouTube channel for some interesting research clips in autonomous racing.
